

The TRU100-23 Magnetic probe system is a real-time communication aeromagnetic product with an integrated multi-probe rubidium optical pump.Through the differential gradient detection method, the integration of advanced spatial int...
• Multi-probe rubidium optical pump
• Ground workstation
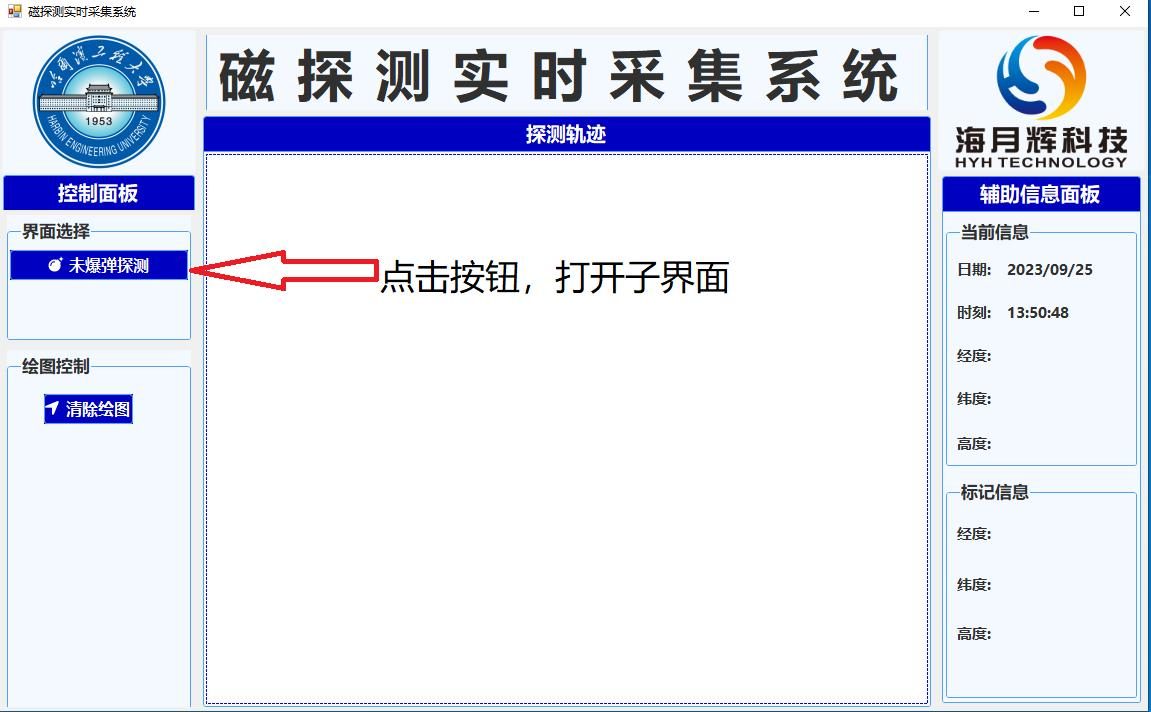
• Real-time acquisition software
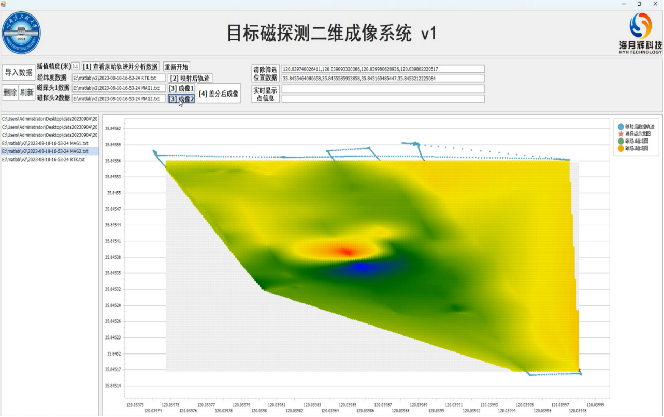
• Imaging post-processing software for multi-rotor drones
• Hongyan Changfei real-time acquisition software
• Sea to sky color magnetic imaging post-processing software
• Measurement and control distance: radius >5km (no shelter)
• Battery life (with load) : >40min
• Wind resistance (with load) : wind speed 13m/s
• Target positioning error: <10cm
• Target depth error: <20cm
1. Complex usage scenarios:
It can realize the detection and location of unexploded bombs in mountain, plain, shoal and other application scenarios.
Simple flight operation, with the DJI M300 platform, making the system stable and easy to operate.
2. Automatic flight planning:
It can automatically detect tasks in the planned area after the planning is complete, improving work efficiency.
3. Real-time communication:
Stable and real-time transmission of magnetic anomaly coordinates within a 5km range meets the need for immediate judgment and processing. Quick and easy installation: The system uses a quick disassembly structure design, and the system assembly can be completed in 10min.
4. Integrated display:
The data acquisition system of gradient magnetometer can display magnetic field information, position information and height information comprehensively.
5. Very low system noise:
Through the differential gradient detection method, the advanced wavelet entropy denoising algorithm is integrated.
6. Efficient data post-processing:
The post-processing imaging software can draw a magnetic map of the detection area in 5 minutes to obtain intuitive detection information.
1. What can it detect?
It can be used to detect ferromagnetic objects, such as mining areas, pipelines, and unexploded bombs.
2. How deep can it probe?
4-6 times the maximum linear scale of the ferromagnetic target.
• Sea 30mm projectile (length 17cm) ≥1.2m
• Sea 37mm projectile (length 38cm) ≥ 1.2m
• 60mm mortar (33cm in length) ≥ 1.5m
• 57mm naval shells (52cm in length) ≥ 1.5m
• 120mm bomb (240cm length) ≥ 5m
3. Detection resolution?
Through the difference algorithm, the system has very low system noise and can distinguish 2nT weak magnetic signal.
4. Ideal flying altitude?
In the case of determining the safety of the system, as close as possible to the ground/water, it is recommended to be 0.5m to 1m above the ground.
5. Can it be detected on water?
Yes, water does not affect sensor operation or weaken magnetic field strength.
Base Package (Required)
a) UAV magnetic detection system
b) Real-time data acquisition system
c) Optical pump (one of two options)
1. Single optical pump
2. Dual optical pump
2.1. Cross bar
2.2. Vertical rods
Value-added package (optional)
a) Two-dimensional post-processing magnetic field data rapid imaging system